

Электрический привод – система для приведения в движение и управления механизмов, машин и оборудования. В состав систем входят электрические двигатели, аппараты и электронные устройства управления и защиты, связи с внешним оборудованием и информационными системами.
Наибольшее распространение получили приводы на базе двигателей переменного тока. На их долю приходится большинство потребляемой в мире электроэнергии. Синхронные и асинхронные электродвигатели отличают небольшие габариты и масса при высокой мощности, относительная простота конструкции и цена.
Основной недостаток силовых агрегатов переменного тока – сложность регулирования скорости и момента на валу.
Для этого используют:
- Передаточные механизмы. Шестеренчатые и ременные передачи позволяют управлять скоростью и моментом. К недостаткам метода относят усложнение кинематической схемы двигателя, необходимость регулярной замены и обслуживания, снижение надежности привода.
- Применение двигателей с фазным ротором. Роторные обмотки позволяют изменять скорость вала. К недостаткам относится высокая цена, значительные габариты специализированных электродвигателей, узкий диапазон регулирования.
Недостатки электрических машин переменного тока вынуждают выбирать двигатель по максимальной мощности, в результате большую часть времени привод работает в режиме недозагрузки и потребляет избыточную мощность.
Частотный метод управление электроприводом
С появлением силовых полупроводниковых элементов стало возможным реализовать частотный метод управления.
Принцип действия способа основан на зависимости частоты вращения магнитного поля статора от частоты напряжения на обмотках.
Она определяется из выражения: , где р – число пар полюсов, f – частота питающего напряжения. Таким образом, скорость вращения ротора можно регулировать изменением частоты питающего напряжения.
Для этого в состав привода вводят преобразователи частоты. Существует несколько схем реализации частотного способа управления. Наибольшее распространение получили ПЧ на транзисторных ключах с промежуточным звеном постоянного тока, построенные по принципу инвертора напряжения.
Устройство состоит из выпрямителя, емкостного звена постоянного тока, инвертора на IGBT-транзисторах.
Переменное напряжение сети сначала преобразуется в постоянное, сглаживается в звене постоянного тока и поступает на инвертор. Преобразование постоянного напряжения осуществляется за счет попеременного открытия и закрытия транзисторных ключей.
Устройство и принцип работы преобразователя частоты
Частотные преобразователи реализуют по схеме, состоящей из силовой и управляющей части. Силовая часть содержит в себе транзисторные, либо тиристорные элементы, работающие в качестве электронных ключей. Регулирование их работы производится при помощи цифровых микропроцессоров, которые помимо управления "ключевой" схемой еще выполняют функции защиты, диагностики и сопряжения с внешней системой управления преобразователем частоты.
В зависимости от принципа построения силовой части преобразователи можно разделить на 2 типа:
- преобразователи частоты с промежуточным звеном постоянного тока;
- без звена постоянного тока (ПЧ с непосредственной связью).
Одним из первых типов преобразователей частоты были именно «частотники» с непосредственной связью. Силовая часть данных устройств основывалась на тиристорных элементах и представляла собой управляемый выпрямитель.
При работе ПЧ группы тиристоров в определенной последовательности открывались, подавая напряжение на обмотки двигателя. Выходное напряжение таких преобразователей имело "пилообразную" форму, а его частота не могла превышать частоту питающей сети. Диапазон регулирования в преобразователях частоты без звена постоянного тока довольно мал – не более 1:10, что является недостаточным в современных реалиях управления технологическими объектами. Вследствие чего, в настоящий момент применение ПЧ подобного типа ограничено для большинства применений в связи с высокими требованиями, которые предъявляются к характеристикам входного напряжения и диапазону регулирования.
Вышеназванные недостатки ПЧ с непосредственной связью были решены в современных преобразователях частоты со звеном постоянного тока, силовая часть которых состоит из выпрямителя, фильтра и транзисторного инвертора.
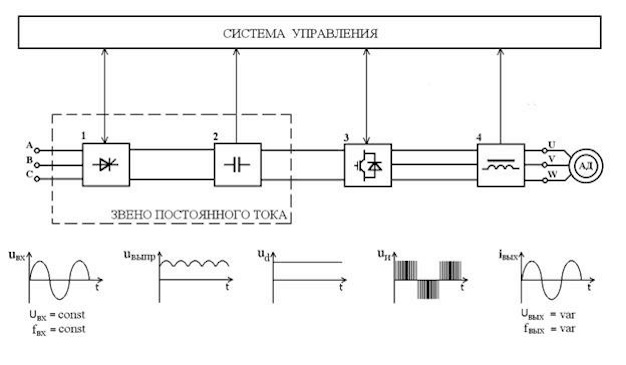
Типовая схема и принципы работы ПЧ со звеном постоянного тока показаны на рисунке:
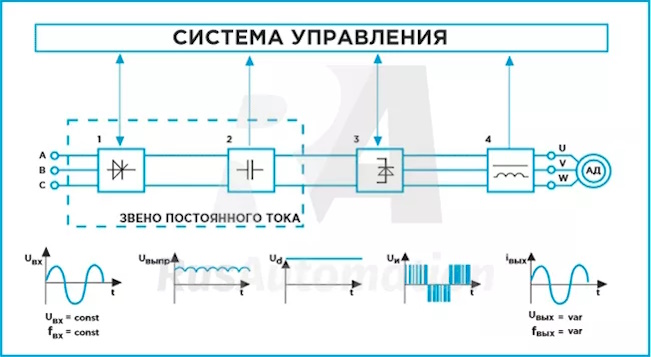
В таких устройствах питающее напряжение преобразовывается дважды: входное напряжение выпрямляется в выпрямителе (1), сглаживается на фильтрующих элементах (2), и далее преобразуется в инверторе (3) в выходной сигнал с широтно-импульсной модуляцией (ШИМ). При необходимости на инверторном выходе до двигателя устанавливается моторный дроссель (4) для сглаживания токовых пульсаций.
На инверторе постоянное напряжение преобразуется в трехфазное переменное с изменяемой частотой и амплитудой. Микропроцессорное устройство в ПЧ подает сигналы управления на силовые транзисторы инвертора, формируя практически синусоидальный сигнал необходимой формы. Наибольшая ширина сигнальных импульсов – в середине полупериода, а в начале и ближе к окончанию полупериода она уменьшается, тем самым обеспечивая ШИМ-модуляцию напряжения, которое подается на обмотки двигателя.
Подобное построение силовой части ПЧ позволило преобразователям со звеном постоянного тока обеспечить:
- широкий диапазон регулирования (до 1: 10 000);
- быстродействие электроприводного комплекса в целом;
- возможность регулирования частоты вращения на низких оборотах двигателя;
- снижение уровня высших гармоник ПЧ и пульсации момента;
- увеличение срока службы преобразователя частоты и управляемого им электродвигателя.
Относительно алгоритмов контроля и управления работой преобразователей частоты на практике подразделяются следующие методы управления:
- скалярное управление;
- векторное управление.
Скалярное (частотное) управление электродвигателем переменного тока используют там, где требуется поддерживать постоянным отношене напряжения к частоте.
Векторный принцип управления относительно скалярного – более производителен, имеет широкий диапазон и точность регулирования (в том числе на малых оборотах двигателя).
Метод управления выбирается в зависимости от требований, которые необходимы для выполнения технологического процесса.
Более подробно о различиях и особенностях применения скалярного и векторного метода регулирования можете прочесть в одной из наших предыдущих статей.
Виды частотных преобразователей
В зависимости от технических особенностей, способа управления и принципа работы устройства могут различаться. По конструктивным характеристикам различают электромашинные и электронные преобразователи. Первый тип также называют индукционным, в основе механизма лежит двигатель переменного тока. Сфера применения электромашинных устройств узкая, в основном их используют, когда нет возможности применять более эффективные электронные частотники.
Полупроводниковые (электронные) частотники конструктивно состоят из двух основных элементов – схемы управления и силовой части. Использовать их можно с комплексе как с однофазными, так и с трехфазными приводами, сфера применения не ограничена. По типу подключения полупроводниковые ЧП разделяют на прямые (с прямым подключением к сети) и устройства, которые подключают с использованием контроллера постоянного тока.
ЧП с непосредственной связью формируют с использованием тиристорных преобразователей, которые отличаются высоким показателем быстродействия. Схемы построения могут быть разными: нулевыми, перекрестными, параллельными или мостовыми. При подключении ЧП соединяют с питающей сетью напрямую.
Скалярные преобразователи
Устройства с таким типом управления модулируют выходное напряжение с определенными параметрами амплитуды и частоты, это позволяет поддерживать магнитный поток на необходимом уровне. К преимуществам скалярных ЧП относят ценовую доступность, они подходят для единовременной работы с несколькими двигателями. Конструкция устройства не сложная, преобразователи часто используют для вентиляторов и насосных агрегатов, а также других типов оборудования, которые не нуждаются в поддержании линейной скорости вращения ротора.
Векторные преобразователи
По типу устройства такие ЧП являются более сложными, благодаря микропроцессору оценка взаимодействия магнитных полей у статора и ротора происходит автоматически. Независимо от показателей нагрузки, частота вращения ротора остается постоянной, что важно для успешного функционирования многих устройств. Векторные преобразователи используют для оборудования, в работе которого важны быстродействие и точность регулировки.
У моделей с векторным управлением два подтипа: с обратной связью и бездатчиковые. Последние применяют для приводов с низкими требованиями к регулированию скорости. Наличие датчика с обратной связью позволяет использовать ЧП для оборудования с широким диапазоном регулирования.
Методы частотного управления двигателем
Различают 2 типа управления частотно-регулируемым электроприводом: векторный и скалярный. Во втором случае поддерживается постоянное отношение U/f (напряжение/частота) независимо от скорости вращения вала.
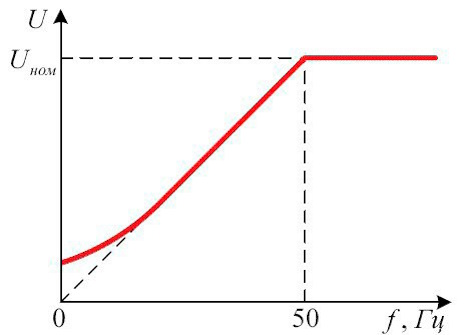
При этом на малых скоростях требуется компенсировать падение напряжения на обмотках статора. Скалярное управление используется в приводах вентиляторов, насосов, станков и оборудования, где не требуется точное регулирование момента и одновременное управление моментом и скоростью.
К достоинствам способа относят:
- Возможность управления несколькими двигателями одним преобразователем частоты.
- Простая аппаратная реализация.
- Относительно невысокая стоимость.
К недостаткам относят невозможность управления моментом, применения с синхронными двигателями на постоянных магнитах, относительно небольшой диапазон регулирования скорости.
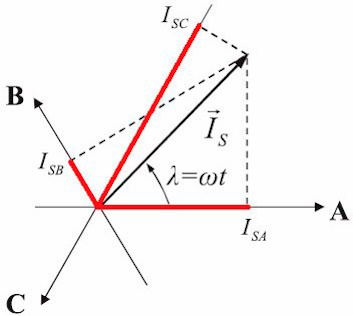
Векторное управление заключается в регулировании величины, частоты и фазы питающего напряжения. Метод позволяет практически безынерционно изменять скорость вращения и момент.
Область применения приводов с векторным управлением – оборудование с высокодинамичной нагрузкой, установки, где необходимо точное регулирование скорости и момента.
Метод имеет следующие преимущества:
- Быстрый отклик при изменении нагрузки.
- Высокая точность регулирования угловой скорости и момента на валу.
- Увеличенный КПД в сравнении со скалярным способом.
- Более широкий диапазон скоростей.
К недостаткам относят высокую стоимость, значительные колебания частоты вращения при неменяющейся нагрузки.
Состав частотно-регулируемого привода
Частотно-регулируемый привод состоит из электродвигателя, преобразователя частоты, вспомогательных электротехнических устройств и аппаратов. Частотное управление подходит для всех широко применяемых типов двигателей переменного тока:
- Асинхронных электрических машин с короткозамкнутым ротором.
- Асинхронных двигателей с фазным ротором.
- Синхронных двигателей.
- Синхронных электродвигателей с постоянными магнитами.

Преобразователь частоты – основная часть привода. Устройство обеспечивает управление скоростью и моментом на валу в зависимости от требований к оборудованию. Наряду с преобразователями со звеном постоянного тока применяют устройства с непосредственной связью с сетью. Область применения таких ПЧ – низкоскоростное оборудование с высокой нагрузкой. Преобразователи частоты могут возвращать электроэнергию, которая вырабатывается при работе двигателя в генераторном режиме.

При необходимости регулирования скорости в широком диапазоне, точного управления моментом и частотой, применяют преобразователи со звеном постоянного тока.
В состав частотно-регулируемого привода также могут входить:
Входные и выходные фильтры. Устройства служат для снижения гармонических искажений тока и напряжения во входной цепи, уменьшения электромагнитных помех, повышения качества напряжения в выходной цепи, а также для дополнительной защиты электронных ключей при коротких замыканиях в цепи нагрузки.Тормозные резисторы. Элементы служат для рассеивания энергии, выделяющейся при высокой скорости торможения двигателя

В состав привода также могут входить датчики скорости и момента, электроаппараты защиты входной и выходной цепи.
Состав, структуру и функциональность частотно-регулируемого привода определяют при проектировании. При этом исходят из требований к техническим возможностям оборудования, электромагнитной совместимости, учитывают условия технологического процесса, внешние факторы, а также другие условия.
Преимущества частотно-регулируемого электропривода
Применение электроприводов на базе преобразователей частоты позволяет существенно увеличить техническую и экономическую эффективность оборудования. Уменьшение затрат осуществляется за счет:
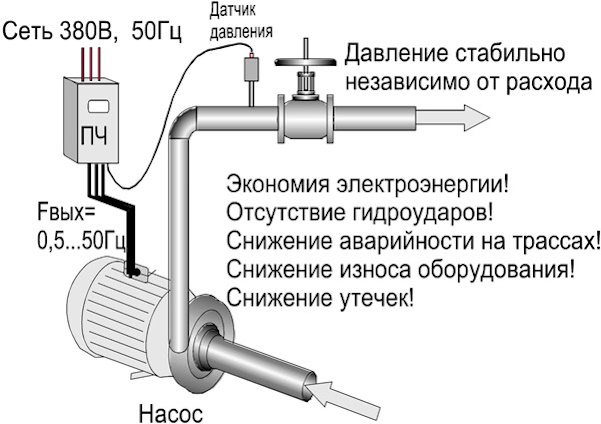
- Снижения потребления электроэнергии. Частотно-управляемый привод не потребляет полную мощность в режиме недозагрузки, что особенно заметно на примерах систем вентиляции. Экономия электроэнергии может составлять до 50-70%.
- Уменьшения количества аварий. Преобразователи частоты продлевают срок службы двигателей, технологических магистралей, оборудования. Пуск на пониженной частоте, плавное регулирование производительности, уменьшение инерционности снижает вероятность гидроударов, ударные нагрузки на механизмы, замедляет старение изоляции, износ механической части.
За счет применения приводов на базе ПЧ значительно уменьшаются простои, связанные с авариями, удлиняются межремонтные промежутки.
Помимо функции регулирования скорости и момента на валу, плавного пуска, разгона и торможения двигателя, преобразователи частоты обладают следующими возможностями:
- Автоматическое регулирование по ПИ, ПИД или другому закону. ПЧ имеют встроенные функции регулятора, на базе устройств можно реализовать любые законы управления, в том числе по изменению одного или нескольких параметров.
- Защиты от ненормальных и авариных режимов. Преобразователи частоты осуществляют отключение при коротком замыкании, несимметричной нагрузке, перегреве обмоток. Устройства также формируют и выдают предупреждение о возникновении ненормального режима. Специализированные преобразователи с пропуском резонансных частот позволяют избежать автоколебаний в контурах вентиляционных или тягодутьевых систем и предотвратить их разрушение.
- Обеспечивают связь с внешними устройствами. Промышленные ПЧ оборудованы модулями поддержки базовых протоколов цифровой связи, частотно-регулируемые приводы легко встраиваются в любые АСУ ТП.
Внедрение частотно-регулируемых приводов позволяет полностью или частично автоматизировать работу как производственного оборудования, так и целых предприятий и инженерных систем, снизить потребление ресурсов без потери эффективности. Относительно высокая стоимость таких электроприводов – несущественный недостаток. Средний срок окупаемости их внедрения составляет от 3 месяцев до 3 лет.
Недостатки устройств
- Достаточно большие габариты, что обусловлено включением в конструкцию нескольких функциональных блоков.
- Уровень потери мощности достаточно высок. Из-за использования двойного преобразования напряжения КПД снижается.
Допустимые режимы управления ЧП
Значительная часть современных моделей частотных преобразователей допускает использование разных режимов управления.
- Ручное. Запуск и торможение двигателя производится через пульт. Важно, что регулировка частотного параметра происходит автоматически, равно как и приостановка работы при возникновении внештатных ситуаций.
- Внешний режим управления. Когда устройство имеет возможность синхронизации с удаленным персональным компьютером, оператор может проводить пуск и остановку, а также контролировать режим работы с его помощью.
- Сухой контакт. При наличии дискретного входа управление преобразователем аналогично запуску исполнительного механизма.
- Управление по событиям. Устройства этого типа используют в комплексе с оборудованием, предполагающим автоматизированную работу (частичную или полную). Для них можно запрограммировать временные точки пуска и остановки, а также параметры работы двигателя.
Пример эффективного применения ЧРП
В качестве одного из объектов частотно-управляемого привода, где применение ПЧ качественно повышает эффективность всего технологического процесса, можно привести в пример подъемные механизмы, в частности – лифтовое оборудование. Учитывая тяжелые условия эксплуатации подобного оборудования, повторно-кратковременные режимы при частых включениях/отключениях, установка частотно-регулируемого привода является эффективной возможностью увеличения технологичности и оптимизации подъемных процессов, позволяя:
- Существенно снизить энергопотребление привода (в среднем, частотный электропривод для управления лифтовым оборудованием экономит до 40% электроэнергии (по сравнению с применениями без ПЧ).
Тем самым значительно уменьшаются затраты на энергоресурсы и есть возможность в минимальные сроки окупить средства, которые были вложены в модернизацию. - Осуществлять плавный запуск, разгон и остановку лифтовых механизмов, обеспечивая необходимое значение крутящего момента двигателя на небольшой частоте вращения и режим “противоотката” кабины лифта.
Это позволит увеличить срок службы электродвигателей и механических частей механизма, уменьшить затраты на техническое обслуживание приводного комплекса, гарантировать оптимальный рабочий режим лифта. - Дополнить защитные функции системы.
Данная опция позволит комплексно защитить привод по токовой перегрузке, перенапряжению, утечек, фазных обрывов и т.д. - Выполнить сброс излишней энергии при остановке приводного механизма.
Это осуществляется при помощи подключаемых к частотнику тормозных резисторов, либо посредством рекуператоров энергии для максимально эффективного управления частотным приводом (в этом случае излишняя энергия будет возвращаться обратно в питающую сеть). - Модернизировать производственный цикл за счет широких возможностей управления работой привода и процессами торможения.
Применение ПЧ обеспечивает точное регулирование скорости движения и положения кабины с помощью датчиков обратной связи (диапазон регулирования скорости 1:1000, точность поддержания скорости составляет 0,01%).
По статистике подобных применений, при внедрении преобразователей в лифтовых системах окупаемость частотного регулируемого привода не превышает 2 лет. При этом сокращаются затраты на обслуживание и ремонт лифтового электропривода.
Выводы
Применение преобразователей частоты при управлении электроприводами позволяет напрямую подстраивать регулируемые производственные характеристики (температуру, давление, скорость движения рабочих механизмов) под различные нужды с сохранением высокого КПД, обеспечивая при этом существенное снижение энергопотребления. Поэтому внедрение частотно-регулируемого привода позволяет решать задачи не только в области автоматизации процесса производства, но и в сфере энергосбережения.
Осуществляя на практике подбор частотного регулируемого привода, необходимо оценить требования, которые предъявляются к объекту управления – это диапазон и точность регулирования, необходимость удержания определенного момента на валу двигателя (в частности, при небольших частотах вращения) и требования к работе электропривода в аварийных ситуациях.