
Вентильный двигатель
Определение вентильного двигателя
Вентильный электродвигатель (ВД) — синхронный бесколлекторный двигатель постоянного тока используемый совместно с системой электронного управления, обеспечивающей синхронизацию вращения электромагнитного поля с вращением ротора.
Технические характеристики вентильного двигателя
При выборе конкретной модели важно определить ее соответствие месту установки, поэтому важно обращать внимание на следующие характеристики вентильных двигателей:
- номинальное напряжение – определяет питающую величину, которая должна подаваться на вентильный двигатель для получения номинального усилия;
- потребляемая мощность – характеристика электродвигателя, показывающая величину мощности, расходуемую на работу устройства;
- КПД – показывает соотношение полезной работы, совершаемой вентильным двигателем к израсходованной мощности;
- мощность на валу – полезная работа электрической машины, совершаемая за счет тягового усилия;
- номинальная частота – определяет количество оборотов в минуту, которые вентильный двигатель может совершать в номинальном режиме работы;
- диапазон регулировки частоты – показывает, в каких пределах можно изменять частоту оборотов вала для конкретной модели;
- номинальный крутящий момент – определяет усилие, создаваемое на валу вентильного двигателя при оптимальных параметрах работы, также в параметрах может регламентироваться пусковой и максимальный момент;
- коэффициент нагрузки – показывает, насколько снижается эффективность электрической машины, в зависимости от подъема над уровнем моря;
- габаритные размеры и масса вентильного двигателя.
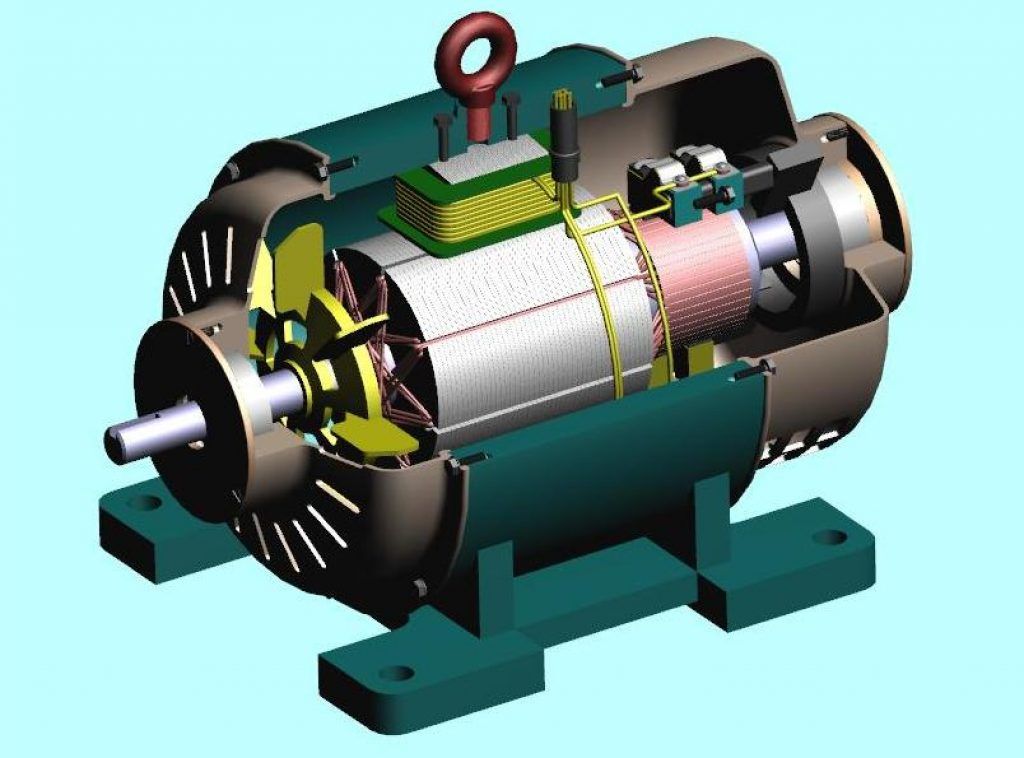
Схема вентильного двигателя

Двигатель состоит из следующих деталей:
1. Задняя часть корпуса.
2. Статор.
3. Подшипник.
4. Магнитный диск (ротор).
5. Подшипник.
6. Статор с обмоткой.
7. Передняя часть корпуса.
У вентильного двигателя имеется взаимосвязь между многофазной обмоткой статора и ротора. У них присутствуют постоянные магниты и встроенный датчик положения. Коммутация прибора реализовывается при помощи вентильного преобразователя, вследствие чего он и получил такое название.
Статор
Статор — неподвижная часть электродвигателя, содержащая обмотки якоря, служащая для создания вращающегося электромагнитного поля внутри двигателя.
Ротор
Ротор — вращающаяся часть электродвигателя, представляющая собой вал с электромагнитом или с постоянными магнитами. В первом случае к обмоткам ротора подключается источник постоянного тока.
В зависимости от количества магнитов, расположенных в поперечном сечении ротора, двигатель будет иметь то или иное количество полюсов.
В погружных вентильных электродвигателях используемых в нефтяной отрасли ротор содержит постоянные магниты. Как правило погружные ВД выпускаются 8-ми и 4-х полюсными.
При одной и той же частоте вращения электромагнитного поля статора частота вращения вентильного электродвигателя с большим количеством пар полюсов будет меньше. Так если скорость вращения 8-ми полюсного электродвигателя 1500 об/мин, то 4-х полюсный при той же частоте поля будет вращаться с частотой 3000 об/мин.
Датчик положения ротора
В синхронных электродвигателях датчик необходим для осуществления обратной связи с положением вала механического устройства. В зависимости от принципа действия могут применяться датчики:
- Фотоэлектрического принципа действия;
- Трансформаторного;
- Индуктивного;
- На эффекте Холла.

Наиболее распространенными вариантами для практической реализации стали фотоэлектрические датчики и датчики с эффектом Холла. Они обладают большей точностью и меньше запаздывают при передаче данных в канале связи. Датчики привязываются к определенным маркерам на валу и реагируют на их прохождение.
Система управления
В состав блока управления, как правило, входит микроконтроллер и электронный ключ для подключения к двух- или трехфазным обмоткам двигателя. Микроконтроллер или микропроцессор необходим для обработки получаемых с датчиков сигналов и последующего преобразования синусоидальной коммутации в более удобную форму сигнала. Электрические преобразователи выполняется на базе полупроводниковых транзисторов, соединенных по мостовой схеме. Они производят широтно-импульсную модуляцию питающего напряжения в соответствии с заданным режимом работы.

В случае соединения обмоток «звездой» устройство имеет большие постоянные моменты, поэтому такую сборку применяют для управления осями. В случае скрепления обмоток «треугольником» их можно использовать для работы с большими скоростями. Чаще всего количество пар полюсов вычисляется численностью магнитов ротора, которые помогают определить соотношение электрических и механических оборотов.
Статор может быть изготовлен с безжелезным или железным сердечником. Используя такие конструкции с первым вариантом, можно обеспечить отсутствие притяжения магнитов ротора, но и в это же мгновение снижается на 20% эффективность двигателя из-за уменьшения значения постоянного момента.

Со схемы видно, что в статоре ток образуется в обмотках, а в роторе создается при помощи высокоэнергетических постоянных магнитов.
Условные обозначения:
- VT1-VT7 - транзисторные коммуникаторы;
- A, B, C – фазы обмоток;
- M – момент двигателя;
- DR – датчик положения ротора;
- U – регулятор напряжения питания двигателя;
- S (south), N (north) – направление магнита;
- UZ – частотный преобразователь;
- BR – датчик частоты вращения;
- VD – стабилитрон;
- L – катушка индуктивности.
Схема двигателя показывает, что одним из основных преимуществ ротора, в котором установлены постоянные магниты, является уменьшение его диаметра и, как следствие, сокращение момента инерции. Такие приспособления могут быть встроенными в сам прибор или расположенными на его поверхности. Понижение этого показателя очень часто приводит к небольшим значениям баланса момента инерции самого двигателя и приведенного к его валу нагрузки, который и усложняет работу привода. По этой причине производители могут предложить стандартный и повышенный в 2-4 раза момент инерции.
Классификация вентильных двигателей
По типу питания вентильные электрические машины подразделяются на электродвигатели постоянного и переменного тока.
По способу взаимодействия магнитного поля статора и ротора встречаются синхронные, асинхронные и индукторные аппараты.
Помимо этого, в зависимости от числа задействованных фаз они разделяются на:
- Однофазные – представляю собой наиболее простой вариант, где используется минимум линий передачи питающего напряжения от блока управления к его обмоткам. Однако в некоторых позиция существует трудность пуска такого вентильного двигателя под нагрузкой.
- Двухфазные – обладают хорошей связью между обмоткой и статором. Но выдают довольно сильные пульсации, которые могут привести к негативным последствиям в работе.
- Трехфазные – наиболее распространенные варианты, способные выдать плавный пуск и нормальный режим работы вентильного двигателя. Характеризуется четным количеством обмоток и хорошими тяговыми характеристиками. К его недостаткам относят лишь чрезмерный шум во время работы.
- Четырехфазные – характеризуются минимальными пульсациями низким пусковым моментом. Но, в сравнении с другими моделями, они имеют высокую себестоимость, из-за чего применяются редко.
Вентильные двигатели постоянного тока
Все двигатели постоянного тока можно назвать бесколлекторными. Они работают от сети с постоянным током. Щеточный узел предусмотрен для электрического объединения цепей ротора и статора. Такая деталь является самой уязвимой и достаточно сложной в обслуживании и ремонте.
Вентильный двигатель постоянного тока работает по тому же принципу, что и все синхронные устройства такого типа. Он представляет собой замкнутую систему, включающую силовой полупроводниковый преобразователь, датчик положения ротора и координатор.
Вентильные двигатели переменного тока
Такие устройства получают свое питание от сетей переменного тока. Скорость вращения ротора и движения первой гармоники магнитной силы статора полностью совпадают. Данный подтип двигателей можно использовать при высоких мощностях. К этой группе относятся шаговые и реактивные вентильные аппараты. Отличительной особенностью шаговых устройств является дискретное угловое смещение ротора при его работе. Питание обмоток формируется при помощи полупроводниковых компонентов. Управление вентильным двигателем осуществляется при последовательном смещении ротора, которое и создает переключение его питания с одних обмоток на другие. Это устройство можно разделить на одно-, трех- и многофазные, первые из которых могут содержать пусковую обмотку или фазосдвигающую цепь, а также запускаться вручную.
Вентильный индукторный двигатель

Вентильно-индукторный двигатель – это устройство, в котором предусмотрено переключающееся магнитное сопротивление. В нем преобразование энергии происходит за счет изменения индуктивности обмоток, которые располагаются на явно выраженных зубцах статора при передвижении зубчатого магнитного ротора. Питание устройство получает от электрического преобразователя, поочередно переключающего обмотки двигателя в строгости по перемещению ротора.
Вентильно-индукторный двигатель представляет собой комплексную сложную систему, в которой работают совместно разнообразные по своей физической природе компоненты. Для удачного проектирования таких устройств необходимы углубленные знания в области конструирования машин и механики, а также электроники, электромеханики и микропроцессорной техники.
Современное устройство выступает как электродвигатель, действующий совместно с электронным преобразователем, который изготавливается по интегральной технологии с использованием микропроцессора. Он позволяет осуществить качественное управление двигателем с наилучшими показателями переработки энергии.
Принципы работы вентильного двигателя

Принцип работы вентильного двигателя основан на том, что контролер устройства начинает коммутировать обмотки статора. Благодаря этому вектор магнитного поля остается всегда сдвинутым на угол, приближающийся к 900 (-900) относительно ротора. Контролер рассчитан на управление током, который движется через обмотки двигателя, в том числе и величиной магнитного поля статора. Следовательно, можно регулировать момент, который воздействует на прибор. Показатель угла между векторами может определить направление вращения, которое действует на него.
Нужно учитывать, что речь идет об электрических градусах (они значительно меньше геометрических). Для примера приведем расчет вентильного двигателя с ротором, который в себе имеет 3 пары полюсов. Тогда оптимальным его углом будет 900 /3=300. Эти пары предусматривают 6 фаз обмоток коммутации, тогда получается, что вектор статора может перемещаться скачками по 600. Из этого видно, что настоящий угол между векторами обязательно будет варьироваться в пределах от 600 до 1200, начиная с вращения ротора.
Вентильный двигатель, принцип работы которого основывается на обороте фаз коммутации, из-за которых поток возбуждения поддерживается относительно постоянным движением якоря, после их взаимодействия начинает формировать вращающийся момент. Он устремляется повернуть ротор таким способом, чтобы все потоки возбуждения и якоря совпали воедино. Но во время его разворота датчик начинает переключать обмотки, и поток перемещается на следующий шаг. В этот момент результирующий вектор сдвинется, но останется полностью неподвижным сравнительно с потоком ротора, что в итоге и создаст вращающий момент вала.
Система управления вентильным электродвигателем
Как было уже сказано выше, вращение вентильного электродвигателя обеспечивает специальная электронная система управления. Ее общее название — инвертор (преобразователь).
Инвертором в данном случае называют электронную систему, осуществляющую подачу напряжения, частота которого не зависит от частоты питающего напряжения на обмотки электродвигателя.
Существуют два основных подхода (принципа) в управлении вентильными электродвигателями:
- 1. Управления коммутацией (6-ти пульсное управление);
- 2. Векторное управление.
Технология изготовления вентильно-индукторных машин
Изготовление индукторных машин не требует какой-то специальной технологии изготовления. Их производство может быть организовано на любом электромашиностроительном заводе, в том числе и на ремонтных заводах соответствующего профиля.
К наиболее важным особенностям конструкции, характеризующих технологичность изготовления данной техники, относятся:
- пассивный безобмоточный шихтованный зубчатый ротор;
- простые катушечные статорные обмотки (шины должны мотаться на «ребро»), надеваемые на зубцы статора.
